Use with COLMAP and pyCOLMAP
COLMAP
COLMAP is a general-purpose Structure-from-Motion (SfM) and Multi-View Stereo (MVS) pipeline with a graphical and command-line interface. It offers a wide range of features for reconstruction of ordered and unordered image collections. COLMAP is available for Windows, Mac, and Linux.
Deep-Image-Matching saves the results in a sqlite database that database can be directly used with COLMAP to visualize the matches and run the reconstruction.
Installation
If you don't have COLMAP installed with the GUI, refer to the instructions at https://colmap.github.io/install.html.
Project Setup
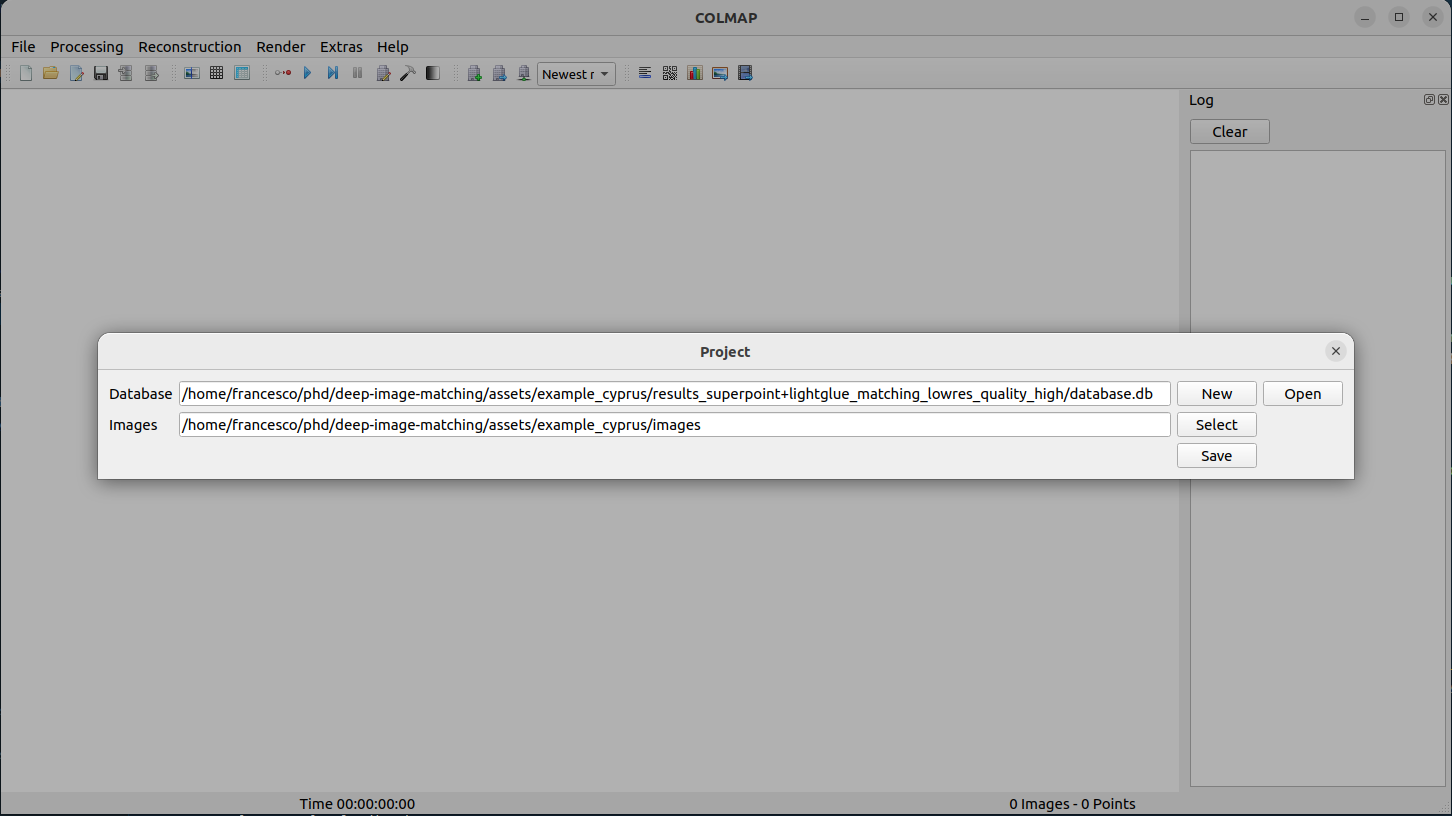
- Launch COLMAP GUI
- Go to
File>New project - Open the sqlite database
database.dbfile in your project's result folder (Database>Open) - Select your project's
imagesfolder (Images>Select) - Click
Save
View Matches
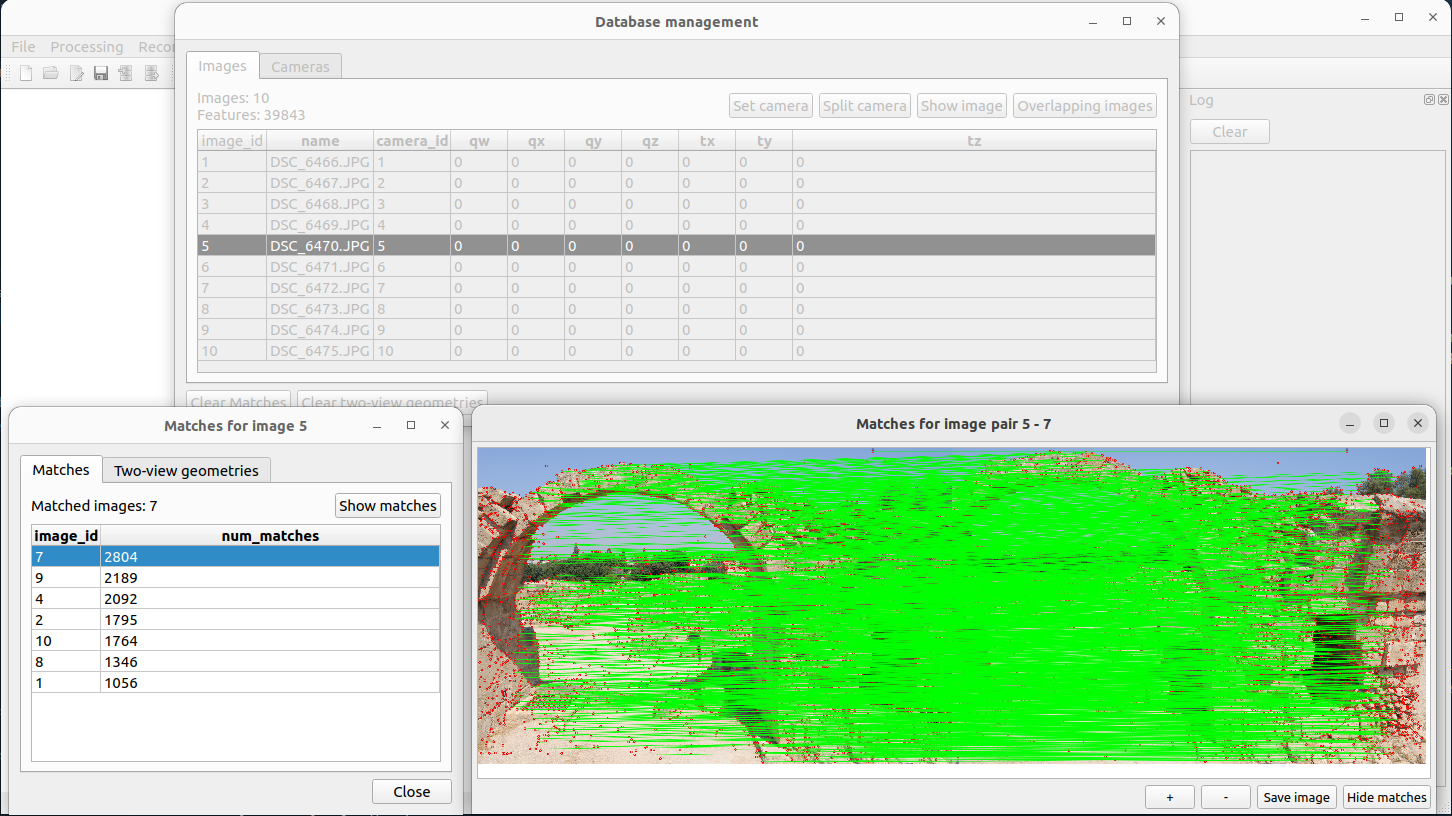
You can then use the Database Management tab to explore the matches for each image pair.
- Go to
Processing>Database Management - Pick an image and click
Overlapping images(top right) - Select the
Two-view geometriestab - Choose an overlapping image's
idand clickShow matches
pyCOLMAP
pyCOLMAP is a python wrapper for COLMAP, it can be used to load and manipulate an existing COLMAP reconstruction.
To run the reconstruction with pyCOLMAP, you must install it first:
pip install pycolmap==0.6.1
and run Deep-Image-Matching without the --skip-reconstruction flag, to save the reconstruction is carried out by pycolmap directly.
python main.py --dir assets/example_cyprus --pipeline superpoint+lightglue
Then you can use the following code to load the reconstruction and manipulate it:
import pycolmap
reconstruction = pycolmap.Reconstruction("path/to/reconstruction/dir")
print(reconstruction.summary())
for image_id, image in reconstruction.images.items():
print(image_id, image)
for point3D_id, point3D in reconstruction.points3D.items():
print(point3D_id, point3D)
for camera_id, camera in reconstruction.cameras.items():
print(camera_id, camera)
reconstruction.write("path/to/reconstruction/dir/")